In a leap for robotic development, the MIT researchers who built a robotic cheetah have now trained it to see and jump over hurdles as it runs — making this the first four-legged robot to run and jump over obstacles autonomously. It's a robot unlike any other: inspired by the world's fastest land animal, controlled by video game technology and packing nifty sensors — including one used to maneuver drones, satellites and ballistic missiles.
The robot, called the cheetah, can run on batteries at speeds of more than 10 mph, jump about 16 inches high, land safely and continue galloping for at least 15 minutes — all while using less power than a microwave oven.
It's the creation of researchers at the Massachusetts of Technology, who had to design key elements from scratch because of a lack of or shortcomings in existing technology.
The researchers developed a three-part algorithm to plan out the robot's path, based on LIDAR data. Both the vision and path-planning system are onboard the robot, giving it complete autonomous control.
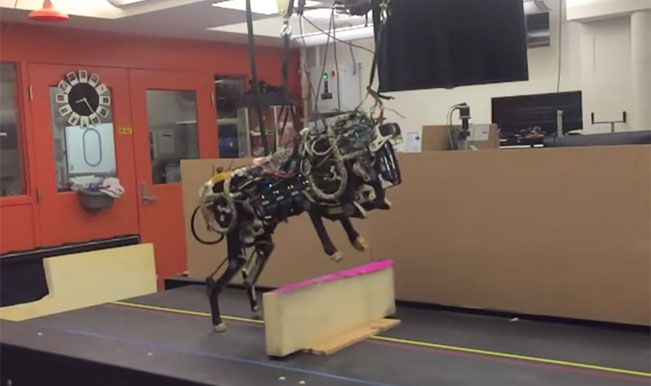
To get a running jump, the robot plans out its path, much like a human runner: As it detects an approaching obstacle, it estimates that object's height and distance.
The robot gauges the best position from which to jump, and adjusts its stride to land just short of the obstacle, before exerting enough force to push up and over.
Based on the obstacle's height, the robot then applies a certain amount of force to land safely, before resuming its initial pace.
In experiments on a treadmill and an indoor track, the cheetah robot successfully cleared obstacles up to 18 inches tall – more than half of the robot's own height – while maintaining an average running speed of 8 km per hour.
The team tested the MIT cheetah's jumping ability first on a treadmill, then on a track. On the treadmill, the robot ran tethered in place, as researchers placed obstacles of varying heights on the belt.
As the treadmill itself was only about 4 metres long, the robot, running in the middle, only had 1 metre in which to detect the obstacle and plan out its jump.
After multiple runs, the robot successfully cleared about 70 percent of the hurdles.
In comparison, tests on an indoor track proved much easier, as the robot had more space and time in which to see, approach, and clear obstacles. In these runs, the robot successfully cleared about 90 percent of obstacles.
The team is now working on getting the MIT cheetah to jump over hurdles while running on softer terrain, like a grassy field.
[youtube height=”500″ width=”800″]https://www.youtube.com/watch?v=_luhn7TLfWU[/youtube]
What do you think About Robot ? We want to hear from you ! Share your comments below.
[divider scroll_text=”Back To Top”]